INTRODUÇÃO
O Profibus é um protocolo digital utilizado em sistemas de controle, que permite a conexão com interoperabilidade de diver sos equipamentos e fabricantes. Possui uma s érie de vantagens em relação à tecnologia 4-20 mA, onde r esumidamente pode-se citar, dentre outras:
Trata-se de um protocolo padronizado, totalmente aberto, onde sua organização de usuários mantem o desenvolvimento e manutenção da tecnologia, combinand o os interesses de usuários e fabricantes. Este padrão é garantido segundo as normas EN 50170 e EN 50254. e foi firmemente estabelecido com a IEC 61158, desde janeiro de 2000.
O Profibus-PA é uma das variantes da tecnologia Profibus, dedicada à área de processos e amplamente utilizada em comunicação digital bidirecional, permitindo a implementação de sistemas de controle de processos tecn ologicamente avançados.
O Profibus-PA permite serviços cíclicos e acíclicos. Os serviços cíclicos são utilizados para a transmissão de dados pertinentes às medições e comandos de atuação co m informações de valor/status. Os serviços acíclicos são utilizados pelas ferramentas de configuração, man utenção e diagnóstico, durante a operação.
ARQUITETURA DO SISTEMA DE CONTROLE DE PROCESSO
Na prática existem diversos fabricantes de sistemas de controle, assim como várias possibilidades de arquiteturas, mas basicamente deve-se atentar para:
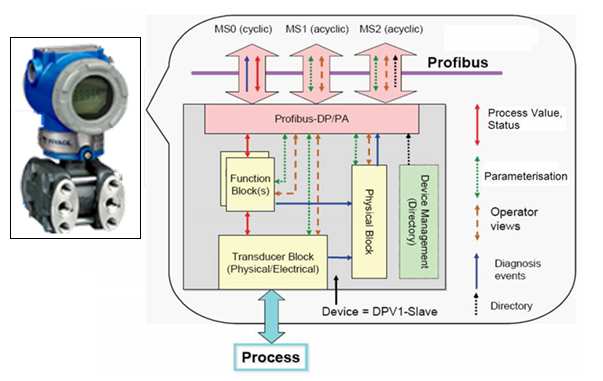
A figura 1 mostra uma arquitetura típica, onde se tem o controlador Profibus, estações de engenharia, ferramentas de parametrização, acopladores e outros elementos da rede.
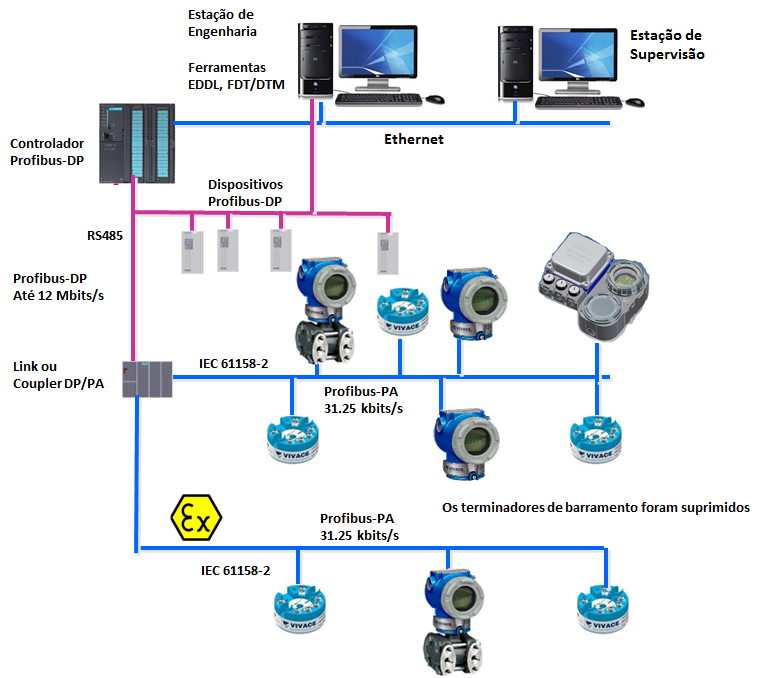
Um sistema Profibus pode ser operado e monitorado independ entemente de equipamentos e fabricantes se todas as funcionalidades e parametrizações, bem como as formas de acesso a estas informações, forem padrões. Estes padrões são determinados pelos profiles (perfis) do Profibus.
Os profiles especificam como os fabricantes devem implementar os objetos de comunicação, variáveis e parâmetros, segundo a classe de funcionamentos dos equipamentos. E ainda existe a classificação dos próprios parâmetros:
Atualmente, o Profibus-PA está definido segundo o PROFILE 3, onde se tem informações para vários tipos de equipamentos, com o transmissores e posicionadores de válvulas.
Estes equipamentos são implementados segundo o modelo de blocos funcionais (Function Blocks), onde um agrupamento de parâmetros garante acesso uniforme e sistemático das informações.
Vários blocos e funções são necessários, dependendo do modo e fase de operação. Basicamente, tem-se os seguintes blocos:
Existem alguns e quipamentos que possuem vários blocos AIs e AOs. São chamados de equipamentos multicanais e possibilitam vários blocos TRDs associados ao hardware.
O Profibus-PA ainda diferencia os profiles em classes:
Uma característica poderosa suportada pelo PROFILE 3 é a definiçã o de cada equipamento segundo os arquivos GSD. Estes arquivos garantem que qualquer sistema Profibus possa integrar o equipamento, independentemente de suas características. Com isto cada fabricante pode desenvolver suas particularidades em formas de blocos funcionais que vão além do que está definido no profile.
Isto agrega valor ao s equipamentos e torna possível a competição de desenvolvimento e oferta de características adicionais nos equipamentos pelos fabricantes, sendo que as particularidades específicas de cada equipamento podem ser acessadas via conceitos padrões de interfaces, baseado em EDDL (Linguagem Eletrônica Descritiva de Equipamentos) ou FDT (Ferramenta de Equipamento de Campo).
Através destas interfaces, o usuário ganha versatilidade e flexibilidade de configuração, parametrização, calibração e principalmente mecanismos de download e upload durante a fase de planejamento/comissionamento dos projetos.
Em geral o Profibus melhora a eficiência e reduz os custos durante o ciclo de vida de uma planta.
Podemos citar como benefícios:
MODELO DE BLOCOS FUNCIONAIS
Em engenharia de processo é comum utilizar blocos funcionais pa ra descrever as características e funções de um ponto de medida ou ponto de manipulação num certo ponto de controle ou para representar uma aplicação de automação através da combinação destes tipos de blocos.
A especificação de dispositivos Profibus-PA utiliza este modelo de blocos de função para representar sequências funcionais, como mostrado na Figura 2.
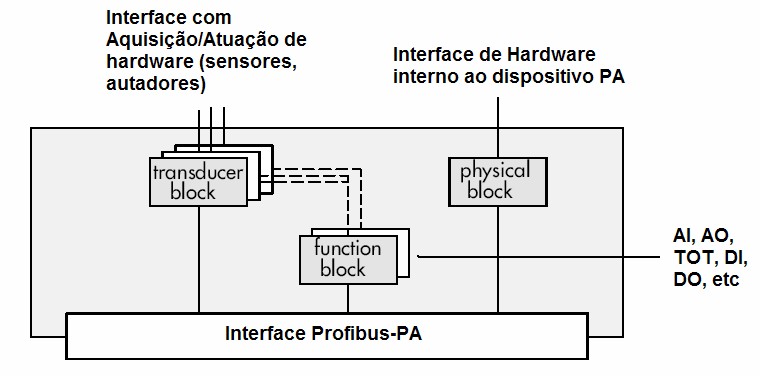
Os seguintes três tipos de blocos são utilizados:
O bloco físico cont ém os dados característicos de um dispositivo, como o modelo do dispositivo, fabricante, versão, número de série etc. Há somente um bloco físico em cada dispositivo.
O bloco transdutor contém todos os dados requeridos para proce ssar um sinal não condicionado, obtido de um sensor, para passar ao bloco de função. Se este processame nto não for necessário, o bloco transdutor pode ser omitid o.
Dispositivos multifuncionais com dois ou mais sensores têm o correspondente número de blocos transdutores.
O bloco de função contém todos os dados para processamento final do valor medido antes da transmissão para o sistema de controle ou, por outro lado, para processamento de uma etapa antes do cenário do processo.
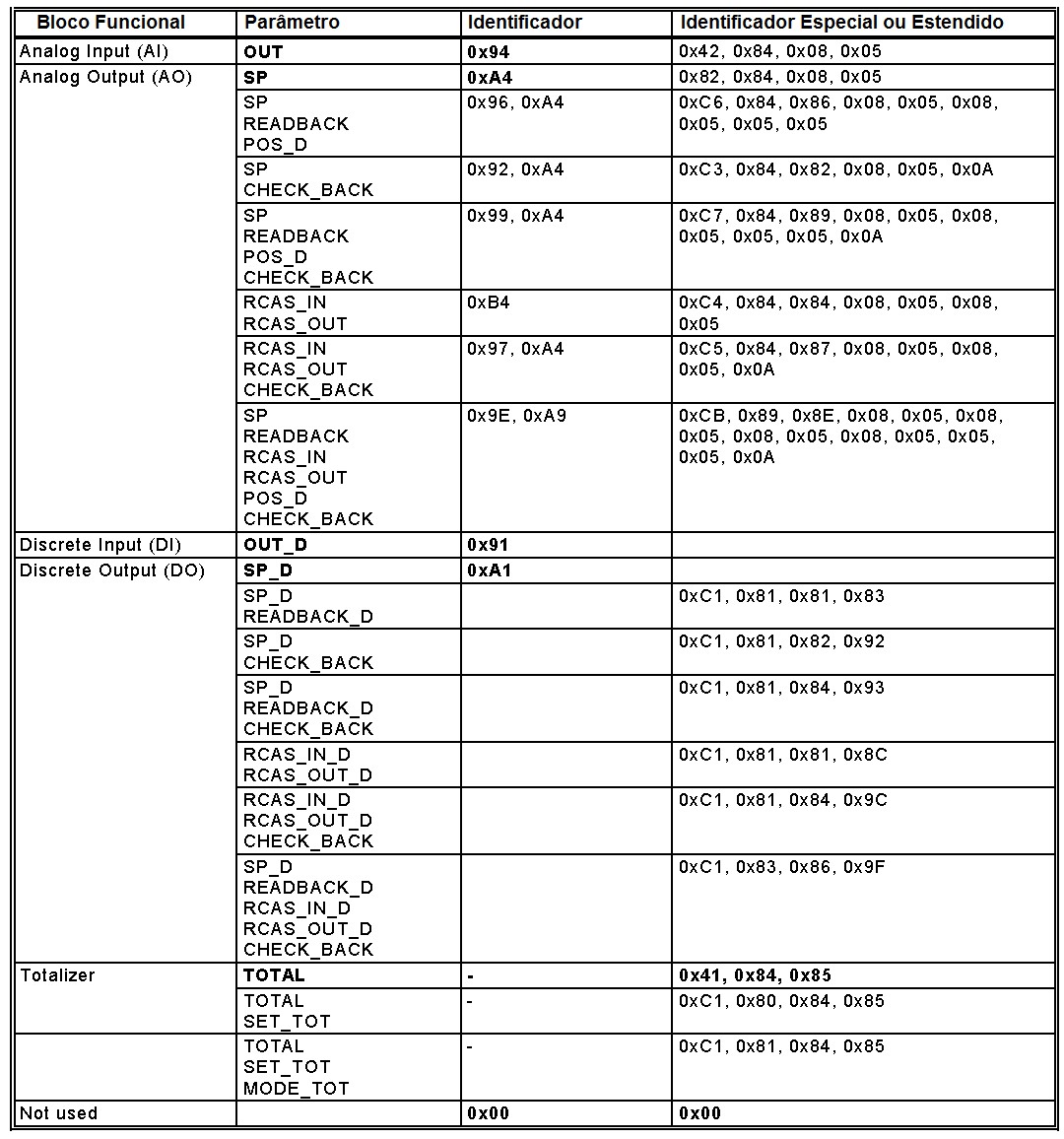
Os seguintes blocos de funções estão disponíveis:
O bloco de entrada analógica fornece o valor medido do sensor e bloco transdutor para o sistema de controle.
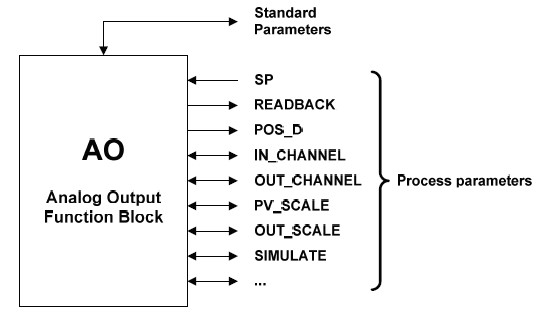
O bloco de saída analógica fornece ao dispositivo o valor especificado pelo sistema de controle.
O bloco de totalização fornece ao dispositivo o valor totalizado especificado pelo sistema de controle.
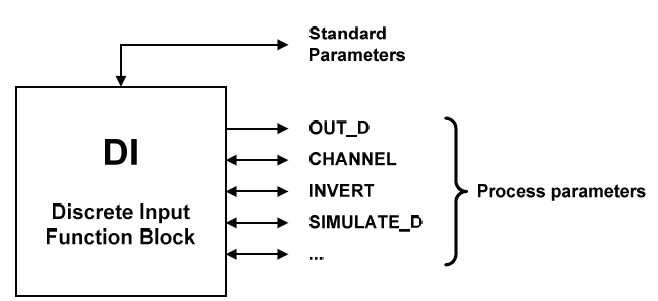
O bloco de entrada digital fornece ao sistema de controle um valor digital do dispositivo.
O bloco de saída digital fornece ao dispositivo um valor especificado pelo si stema de controle.
Os blocos são implementados pelos fabricantes como soluções de software nos dispositivos de campo e, levando como o conjunto, representam a funcionalidade do dispositivo. Como regra, vários blocos podem trabalhar em conjunto em uma aplicação. Veja a Figura 3.
PHYSICAL BLOCK (PB)
O bloco físico contém os dados característicos de um dispositivo, como o modelo do dispositivo, fabricante, versão, número de série etc. Há somente um bloco físico em cada dispositivo.
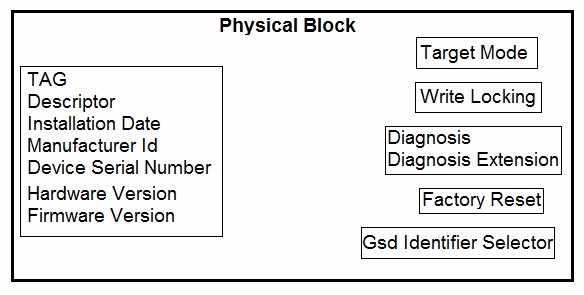
As seguintes informações/f unções são fornecidas pelo Physical Block:
| BLOCO FÍSICO – Slot (0) | ||||||
| Parâmetro | Índice Relativo | Descrição | Tipo de dado | Armazenamento em memória e acesso R/W | Faixa de valores | Padrão (Default) |
| ST_REV | 1 | Este parâmetro será incrementado sempre que houver mudança em parâmetros estáticos (S) do bloco. | Unsigned16 | S/RO | 0 | |
| TAG_DESC | 2 | Tag do bloco. Este parâmetro deve ser único na configuração. | Oct-String(32) | S/RW | Espaços | |
| STRATEGY | 3 | Valor fornecido pelo usuário que identifica uma configuração. | Unsigned16 | S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes. | Unsigned8 | S/RW | 1 a 255 | 0 |
| TARGET_MODE | 5 | Contém o modo desejado para o bloco. | Unsigned8 | S/RW | AUTO | AUTO |
| MODE_BLK | 6 | Modo corrente do bloco. | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados presentes dos alarmes de bloco. | DS-42 | D/RO | 0,0,0,0 | |
| SOFTWARE_REVISON | 8 | Número da revisão de software do equipamento de campo. | Visible-String(16) | S/RO | ||
| HARDWARE_REVISON | 9 | Número da revisão do hardware do equipamento de campo. | Visible-String(16) | S/RO | ||
| DEVICE_MAN_ID | 10 | Número de identificação do fabricante. | Unsigned16 | S/RO | ||
| DEVICE_ID | 11 | Número do modelo do fabricante associado ao equipamento. | Visible-String(16) | S/RO | ||
| DEV_SER_NUM | 12 | Número de série do equipamento de campo. | Visible-String(16) | S/RO | ||
| DIAGNOSIS | 13 | Bitstring indicando o diagnóstico do equipamento. | Octet-String(4) | D/RO | ||
| DIAGNOSIS_EXTENSION | 14 | Não usado. | Octet-String(6) | D/RO | ||
| DIAGNOSIS_MASK | 15 | Bitstring indicando os tipos de diagnósticos suportados pelo equipamento de campo. | Octet-String(4) | D/RO | ||
| DIAGNOSIS_MASK_EXTENSION | 16 | Não usado. | Octet-String(6) | D/RO | ||
| DEVICE_CERTIFICATION | 17 | Certificações do equipamento de campo. | Visible- String(32) |
S/RO | ||
| WRITE_LOCKING | 18 | Se bloqueado, nenhuma mudança é permitida, exceto para se alterar o WRITE_LOCKING. Entradas cíclicas no bloco serão atualizadas continuamente. | Unsigned16 | S/RW | 0: Escrita Bloqueada 2457: Escrita Desbloqueada |
2457 |
| FACTORY_RESET | 19 | Permite que o equipamento reinicie pelo comando do usuário. Vários níveis de reinicializações são possíveis. | Unsigned16 | S/RW | 1: Reinicia com padrão (default) 2506: Reinicia o processador 2712: Recupera o endereço padrão (126) para o equipamento. |
0 |
| DESCRIPTOR | 20 | É uma descrição fornecida pelo usuário para o bloco na aplicação. | Octet-String(32) | S/RW | Espaços | |
| DEVICE_MESSAGE | 21 | Mensagem do bloco fornecida pelo usuário na aplicação. | Octet-String(32) | S/RW | Espaços | |
| DEVICE_INSTALL_DATE | 22 | Data da instalação do equipamento. | Octet-String(16) | S/RW | Espaços | |
| LOCAL_OP_ENA | 23 | Não usado. | Unsigned8 | N/RW | 1 | |
| IDENT_NUMBER_SELECTOR | 24 | Permite que o usuário selecione o Identifier Number do equipamento. | Unsigned8 | S/RW | 0: Profile specific Ident_Num 1: Manufacturer specific Ident_Num 2: Manufacturer specific Ident_Num of V2.0 3: Ident_Num of Multi_Variable device |
|
| HW_WRITE_PROTECTION | 25 | Não usado. | Unsigned8 | D/RO | ||
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW - Escrita/Leitura; RO – Somente leitura; D – Dinâmico; N – Não-volátil; S – Estático | ||||||
A seguir, tem-se um detalhamento dos parâmetros mais utilizados. Para mais detalhes e outros parâmetros, consulte a documentação da Organização Profibus International.
PARÂMETRO FACTORY_RESET
Em algumas aplicações é interessante que o usuário possa reinicializar o equipamento Profibus-PA através de sua estação de trabalho. O padrão Profibus permite algumas formas de comandos de inicialização do equipamento através do parâmetro FACTORY_RESET do Physical Block:
| FACTORY_RESET | ||
| Opção | Tipo de Ação | Descrição |
| 1 | Restart with defaults (Reinicia com os padrões). | Reinicia o equipamento com os valores padrões (default). Funciona como uma inicialização de fábrica. |
| 2506 | Restart processor (Reinicia o processador). | Reinicia o equipamento com os valores mais recentes em sua memória. |
| 2712 | Restart bus address (Reinicia com o endereço 126). | Inicia o equipamento com o endereço 126. |
PARÂMETRO DE ESCRITA
Um equipamento Profibus-PA pode ser acessado pelo usuário via estação de trabalho, localmente através de uma interface d e ajuste local ou ainda por um mestre Profibus C lasse 1. Para evitar acessos não autorizados, pode-se prote ger o equipamento através do parâmetro WRITE_LOCKING, bloqueando a escrita acíclica.
Se o parâmetro WRITE_LOCKING estiver bloqueado (“Locked”), impedirá qualquer comando de escrita no equipamento. O s acessos cíclicos, assim como os cálculos feitos pelo equipamento continuarão normalmente, mas a escrit a acíclica será bloqueada. Quando em “Write Unlocked“, a escrita acíclica (para configuração/parametrizaç ão) será novamente permitida.
SELEÇÃO DO NÚMERO IDENTIFICADOR (GSD IDENTIFIER NUMBER)
O parâmetro IDENT_NUMBER_SELECTOR permite ao usuário selecio nar um número válido e diferente do identificador.
A comunicação cíclica com o mestre Profibus Classe 1 utiliza-se do I dent Number para ter uma relação única entre mestre e escravo, associada ao arquivo GSD.
Se o perfil do equipamento é mudado de acordo com o Ident Number, o equipamento interagirá com as características do pe rfil associado ao arquivo GSD.
Após uma alteração do Ident Number, o equipamento deve ser reinicializado para que possa ter sua comunicação cíclica de acor do com o novo valor de Ident Number.
| IDENT_NUMBER_SELECTOR | Permite a seleção do Identifier Number do equipamento. | 0: Profile specific Ident_Num 1: Manufacturer specific Ident_Num 2: Manufacturer specific Ident_Num of V2.0 3: Ident Num of Multi Variable device |
Ao energizar os equ ipamentos da Vivace Process Instruments, dentre as mensagens de inicialização, serão exibidas no LCD:
Quando em IDSEL PROFI, caso o arquivo GSD utilizado seja d o equipamento Vivace, haverá comunicação acíclica com ferramentas de configuração (por exemplo, PD M ou Pactware) e não haverá comunicação cíclica com o mestre Profibus Classe 1 (PLC).
DIAGNÓSTICOS
A tecnologia Profibus prevê alguns mecanismos de diagnósticos durante a comunicação cíclica. O Physical Block possui o parâmetro DIAGNOSIS que tem a inf ormação sobre os “alertas” no equipamento (por exemplo, device not initialized, power up, factory init, hardware failure etc.). O parâmetro DIAGNOSIS_MASK tem o diagnóstico suportado pelo equipamento.
DIAGNÓSTICO EM EQUIPAMENTOS DE SAÍDA
No bloco AO existe um parâmetro especial de saída com a finalidade de diagnóstico para elementos de saída, como atuadores ou posicionadores de válvulas.
O parâmetro CHECKBACK é um parâmetro do tipo bitstring (somen te leitura) que possui o resumo das informações principais entre o bloco funcional AO e o bloco transdutor. O CHECKBACK pode ainda ser utilizado para configuração cíclica, o que será visto posteriormente.
| Bit | Mnemônico | Descrição |
| 0 | DIA_HW_ELECTR | Falha de hardware: componentes eletrônicos. |
| 1 | DIA_HW_MECH | Falha de hardware: componentes mecânicos. |
| 2 | DIA_TEMP_MOTOR | Temperatura do motor muito alta. |
| 3 | DIA_TEMP_ELECTR | Temperatura eletrônica muito alta. |
| 4 | DIA_MEM_CHKSUM | Erro de memória. |
| 5 | DIA_MEASUREMENT | Falha na medição. |
| 6 | DIA_NOT_INIT | Equipamento não inicializado. |
| 7 | DIA_INIT_ERR | Erro de inicialização |
| 10 | DIA_ZERO_ERR | Erro de zero. |
| 11 | DIA_SUPPLY | Falha da fonte de alimentação. |
| 12 | DIA_CONF_INVAL | Configuração inválida. |
| 13 | DIA_WARM_START | Reinicialização em andamento (alimentado). Este bit vai para "verdadeiro" quando alimentado e será automaticamente reiniciado após 10 segundos. |
| 14 | DIA_COLD_START | Nova inicialização em andamento (Inic. de fábrica). Este bit vai para "verdadeiro" quando a inicialização de fábrica ocorre e será automaticamente reiniciado após 10 segundos. |
| 15 | DIA_MAINTAINANCE | Manutenção requerida. |
| 16 | DIA_CHARACT | Caracterização inválida. |
| 17 | IDENT_NUMBER_VIOLATION | Vai para 1 durante a troca de dados cíclicos se o valor do Ident Number do equipamento (de acordo com o parâmetro IDENT_NUMBER_SELECTOR) e o arquivo GSD forem diferentes. |
| 37 | EXTENSION_AVAILABLE | Mais informações de diagnóstico estão disponíveis, de acordo com o parâmetro DIAGNOSIS_EXT. |
| Bit | Mnemônico | Descrição |
| 0 | CB_FAIL_SAFE | Equipamento de campo com Fail Safe (falha segura) ativa. |
| 1 | CB_REQ_LOC_OP | Requisita operação local. |
| 2 | CB_LOCAL_OP | Equipamento de campo em operação local, LOCKED OUT em funcionamento. |
| 3 | CB_OVERRIDE | Emergência override ativa. |
| 4 | CB_DISC_DIR | Posição de realimentação diferente da esperada. |
| 5 | CB_TORQUE_D_OP | Limite de torque na direção OPEN excedido. |
| 6 | CB_TORQUE_D_CL | Limite de torque na direção CLOSE excedido. |
| 7 | CB_TRAV_TIME | Indica que o tempo de curso do atuador foi excedido. |
| 8 | CB_ACT_OPEN | Atuador move-se na direção de abertura. |
| 9 | CB_ACT_CLOSE | Atuador move-se na direção de fechamento. |
| 10 | CB_UPDATE_EVT | Alerta gerado por mudança em parâmetros estáticos. |
| 11 | CB_SIMULATE | Simulação de valores de processo habilitada. |
| 13 | CB_CONTR_ERR | Malha de controle interno interrompida. |
| 14 | CB_CONTR_INACT | Posicionador inativo (OUT status = BAD). |
| 15 | CB_SELFTEST | Equipamento em auto-teste. |
| 16 | CB_TOT_VALVE_TRAV | Indica que o limite total de curso da válvula foi excedido. |
| 17 | CB_ADD_INPUT | Indica que uma entrada adicional (por exemplo, para diagnóstico) está ativa. |
DIAGNÓSTICOS CÍCLICOS
Os diagnósticos podem ser verificados ciclicamente ou aciclicamente, através de leituras via mestre Profibus-DP classe 1 e classe 2, respectivamente.
Os equipamentos de campo Profibus-PA disponibilizam 04 byt espadrões via Physical Block. Quando o bit mais significativo do 4º byte for “1”, o diagnóstico será estendido em mais 6 bytes. Estes bits de diagnósticos estarão descritos no arquivo GSD. Unit_Diag_bit está descrito no arquivo GSD do equipamento Profibus-PA.
| DIAGNÓSTICOS | |||||||||||||||||||
| Physical Block | |||||||||||||||||||
| Comprimento do byte de status | Tipo de status | Slot do Physical Block | Status Appears / Disappears | Diag. Padrão | Diag. Estendido (de acordo com o fabricante) | ||||||||||||||
| 08 – Diag Padrão FE – Diag. Estendido |
FE | 01 | 01-Appears 02-Disappears |
4 bytes Bit 55 (MSB do 4° byte) = 1 - Diag. estendido |
6 bytes | ||||||||||||||
| Bytes de Diagnóstico | |||||||||||||||||||
| Byte 1 | Byte 2 | ||||||||||||||||||
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |||
| Unit_Diag_Bit | 31 | 30 | 29 | 28 | 27 | 26 | 25 | 24 | 39 | 38 | 37 | 36 | 35 | 34 | 33 | 32 | |||
| Byte 3 | Byte 4 | ||||||||||||||||||
| Bit | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 | |||
| Unit_Diag_Bit | 47 | 46 | 45 | 44 | 43 | 42 | 41 | 40 | 55 | 54 | 53 | 52 | 51 | 50 | 49 | 48 | |||
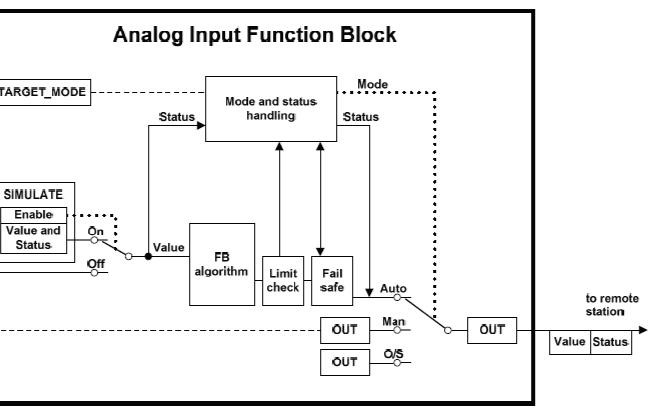
ANALOG INPUT BLOCK (A I)
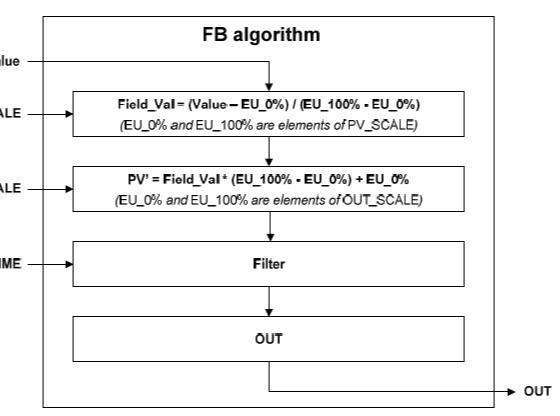
O bloco AI recebe um valor analógico do processo através do bloco transdutor (TRD) em seu canal e o processa de acordo com sua configuração, disponibilizando-o ao mestre Profibus Classe 1. Possui modo de operação, escala, filtro, limites, simulação e tratamento de erros.
O bloco AI suporta os seguintes modos:
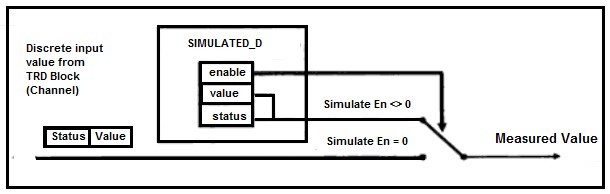
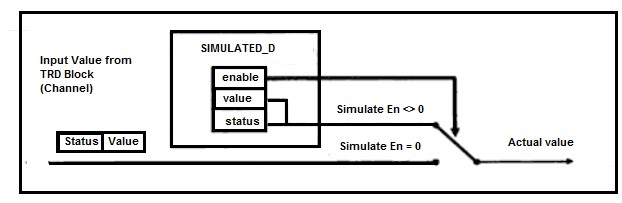
O bloco AI permit e ainda que o usuário simule um valor de processo, através do parâmetro SIMULATE. Este parâmetro é usado para facilitar testes, por exemplo, quan do se está fazendo o startup de malhas de controle
A estrutura SIMULATE é co mposta pelos seguintes atributos:
Quando ativo, o valor do bloco transdutor e o status serão s obrepostos pelo status e valor simulados. Quando desabilitado, o valor de processo será disponibilizado pe lo bloco transdutor ao bloco AI.
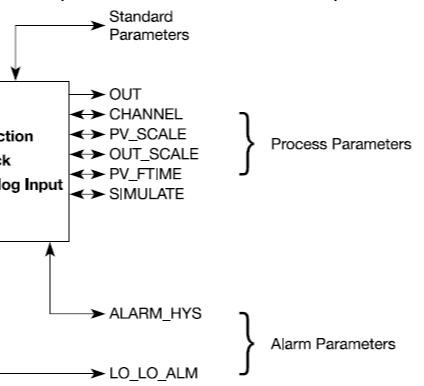
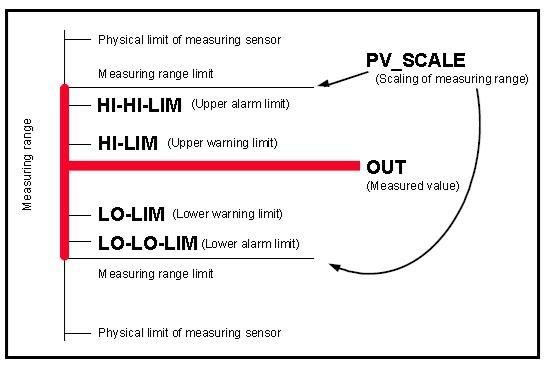
LIMITES E ALERTAS
O bloco AI suporta em seu algoritmo a verificação de limites de al armes e alertas. O usuário pode configurar os limites de a larmes e alertas através dos parâmetros HI_ HI_LIM, LO_LO_LIM e HI_LIM, LO_LIM, indicando os limites superior extremo, inferior extremo, superior normal e inferior normal, respectivamente.
Um alerta ou um alarme altera a condição do status do parâ metro AI_OUT. O parâmetro ALARM_HYS indica a histerese da variação do parâmetro e deve ser confi gurado evitando falsos alertas e alarmes. Um alerta ou um alarme também altera a condição do parâmetro ALARM_SUM.
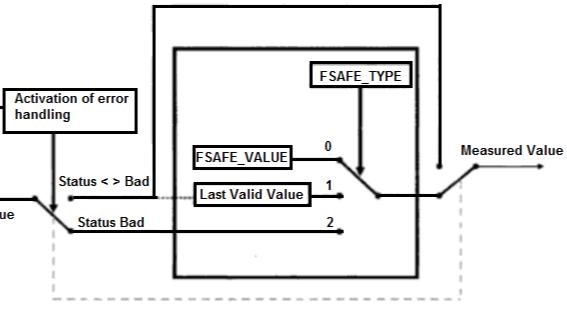
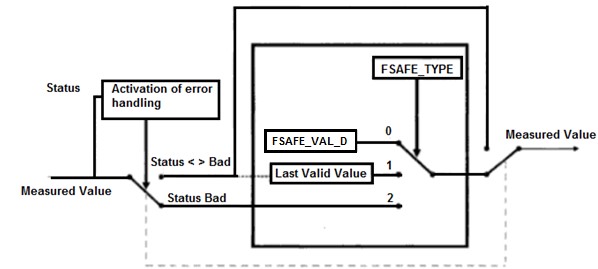
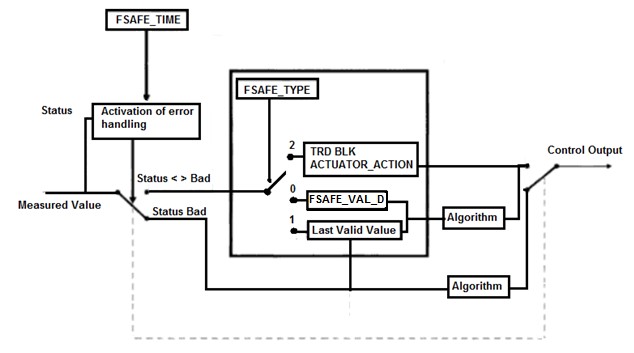
TRATAMENTO DE ERROS – FALHA SEGURA
Se um erro aconte cer no processo de medição, aquisição do valor do bloco transdutor (TRD) ou perda de comunicação cíclica com o mestre Profibus Classe 1, o mesmo se propagará através do status da variável de interligação do c anal com o bloco AI.
Nesta condição, o usuário pode configurar o tipo de tratamento qu e deve acontecer com a saída do bloco, através do parâmetro FSAFE_TYPE. A saída irá para a condição de falha segura configurada se a situação de anormalidade permanecer por um período de tempo maior que o configurado no parâmetro FSAFE_TIME. Após a normalização da condição, o bloco AI retornará à oper ação normal.
CONDIÇÕES QUE ATIVAM A FALHA SEGURA
Quando os blocos f uncionais de entrada ou saída detectam uma co ndição de anormalidade, entram no modo de falha segura (FAIL_SAFE), caso assim estiver configurado. Estas situações de anormalidade são detectadas através de diferentes formas, dependendo do tipo dos blocos funcionais (entrada ou saída).
Os blocos funcionais de entrada recebem (via canal) os valores e status dos blocos transdutores. Caso recebam uma condiçã o de status “bad” (ruim), por exemplo, numa falha de leitura de um sensor, a condição de FAIL_SAFE do b loco é ativada, se estiver configurada.
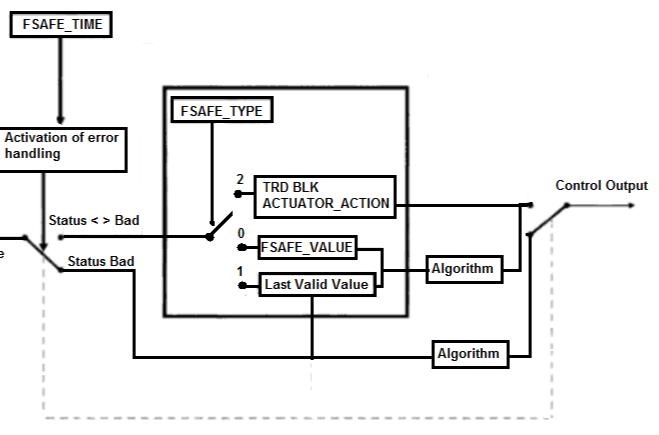
Os blocos funcionais de saída recebem os valores de entrada do mestre Profibus Classe 1 via comunicação cíclica e a ação de FAIL_SAFE é ativada quando uma das seguintes condições é detectada:
FSAFE_TIME;
FSAFE_TIME;
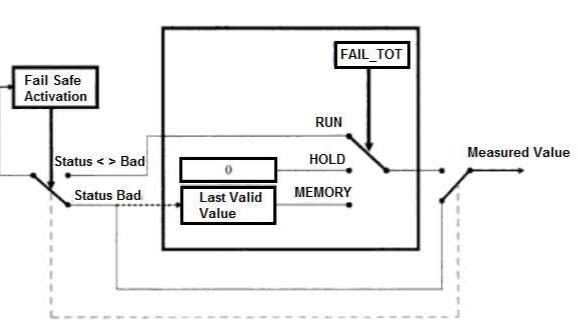
AÇÕES DE FALHA SEGURA
Quando na condição de falha segura, as ações possíveis a um bloco de entrada ou saída podem ser selecionadas pelo usuário através do parâmetro FSAFE_TYPE nos blocos AI e AO ou usando o parâmetro de FAIL_TOT no bloco TOT.
No parâmetro FSAFE_TYPE as seguintes opções estão disponíveis:
Para o Bloco TOT (Totalizador) tem-se o parâmetro FAIL_TOT e as seguintes opções:
| BLOCO DE ENTRADA ANALÓGICA – AI (Equipamentos com somente 1 AI: slot 1, se 2 AIs: Slot 1 e 2, se 3 AIs: slot 1, 2 e 3) |
||||||
| Parâmetro | Índice Relativo | Descrição | Tipo de dado | Armazenamento em memória e acesso R/W | Faixa de valores | Padrão (Default) |
| ST_REV | 1 | Este parâmetro será sempre incrementado quando ocorrer mudanças em parâmetros estáticos do bloco. | Un- signed16 |
S/RO | 0 | |
| TAG_DESC | 2 | TAG do bloco. Este parâmetro deve ser único na configuração. | Oct- String(32) |
S/RW | Espaços | |
| STRATEGY | 3 | É um valor fornecido pelo usuário para identificar uma configuração. | Un- signed16 |
S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes. | Un- signed8 |
S/RW | 1 a 255 | 0 |
| TARGET_MODE | 5 | Contém o modo de operação desejado para o bloco. | Un- signed8 |
S/RW | O/S, MAN e AUTO | AUTO |
| MODE_BLK | 6 | Modo de operação corrente do bloco. | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados presentes dos alarmes de bloco. | DS-42 | D/ RO | 0,0,0,0 | |
| BATCH | 8 | Para uso em sistema distribuído. Utilizado para identificar canais usados e disponíveis. Não há algoritmo relacionado. | DS-67 | S/RW | 0,0,0,0 | |
| OUT | 10 | Valor analógico calculado como o resultado da execução do algoritmo do bloco funcional. | DS-33 | D / Man | OUT_SCALE | |
| PV_SCALE | 11 | Os valores de escala Eu100% e Eu0% para o bloco transdutor de acordo com o canal especificado. | 2 Floats | S/RW | 100,0 | |
| OUT_SCALE | 12 | Os valores de escala Eu100% e Eu0%para o parâmetro OUT. | DS-36 | S/RW | 100,0 e 0.0 % | |
| LIN_TYPE | 13 | Não usado. | Un- signed8 |
S/RW | 0 | |
| CHANNEL | 14 | O número do canal lógico de hardware para o bloco transdutor que será conectado a este bloco funcional. | Un- signed16 |
S/RW | 0 | |
| PV_FTIME | 16 | Constante de tempo de um filtro exponencial para a PV, em segundos. | Float | S/RW | Somente valores positivos. | 0 |
| FSAFE_TYPE | 17 | Define o tipo de ação do equipamento na condição de Fail Safe. | Un- signed8 |
S/RW | 0:Use FSAFE_VALUE 1:Use Last Usable Value 2:Use Wrong Value |
1 |
| FSAFE_VALUE | 18 | Valor de segurança para a saída quando está ativo o Fail Safe. | Float | S/RW | OUT_SCALE | 0 |
| ALARM_HYS | 19 | Parâmetro de histerese de alarme. Para sair da condição de alarme, o valor da PV deve retornar dentro dos limites do alarme mais a histerese. | Float | S/RW | 0 a 50 % | 0.5% |
| HI_HI_LIM | 21 | O ajuste para o alarme superior em unidades de Engenharia. | Float | S/RW | OUT_SCALE, +INF | INF |
| HI_LIM | 23 | O ajuste para o alarme superior em unidades de Engenharia. | Float | S/RW | OUT_SCALE, +INF | INF |
| LO_LIM | 25 | O ajuste para o alarme inferior em unidades de Engenharia. | Float | S/RW | OUT_SCALE, -INF | INF |
| LO_LO_LIM | 27 | O ajuste para o alarme inferior em unidades de Engenharia. | Float | S/RW | OUT_SCALE, -INF | INF |
| HI_HI_ALM | 30 | O estado do alarme superior extremo. | DS-39 | D/RW | ||
| HI_ALM | 31 | O estado do alarme superior. | DS-39 | D/RW | ||
| LO_ALM | 32 | O estado do alarme inferior. | DS-39 | D/RW | ||
| LO_LO_ALM | 33 | O estado do alarme inferior extremo. | DS-39 | D/RW | ||
| SIMULATE | 34 | Permite que o valor do transdutor seja fornecido manualmente pelo usuário quando habilitado o modo simulação. | DS-50 | S/RW | 0: Disable; ¹0: Enable. |
Disable |
| OUT_UNIT_TEXT | 35 | É usado quando a unidade desejada pelo usuário não está na lista de códigos de unidades. O usuário pode fornecer uma unidade em texto, a chamada unidade de usuário | Oct- String(16) |
S/RW | ||
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW - Escrita/Leitura; RO – Somente leitura; D – dinâmico; N – Não-volátil; S – Estático; INF – Infinito | ||||||
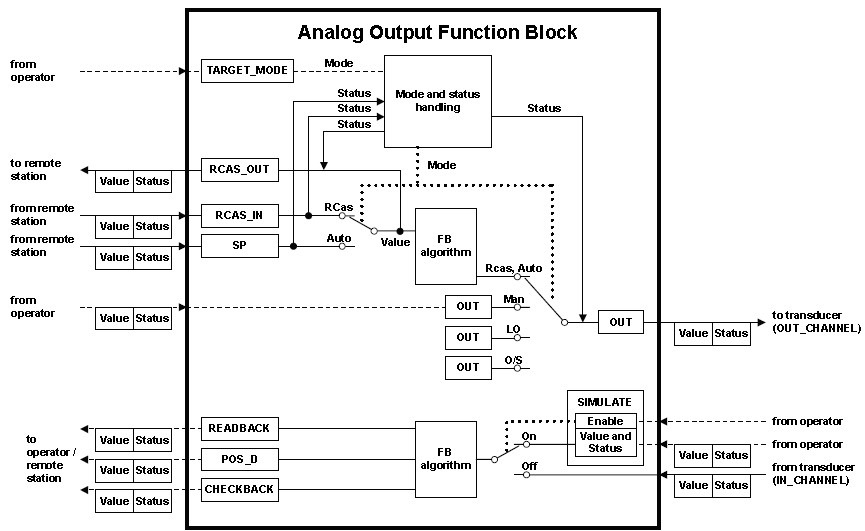
| BLOCO DE SAÍDA ANALÓGICA – AO (Equipamentos com somente 1 AO: slot 1, se 2 AOs: Slot 1 e 2, se 3 AOs: slot, 1, 2 e 3) |
||||||
| Parâmetro | Índice Relativo | Descrição | Tipo de dado | Armazenamento em memória e acesso R/W | Faixa de valores | Padrão (Default) |
| ST_REV | 1 | Este parâmetro será sempre incrementado quando ocorrer mudanças em parâmetros estáticos do bloco. | Un- signed16 |
S/RO | 0 | |
| TAG_DESC | 2 | Tag do bloco. Este parâmetro deve ser único na configuração. | Oct- String(32) |
S/RW | Espaços | |
| STRATEGY | 3 | É um valor fornecido pelo usuário para identificar uma configuração. | Un- signed16 |
S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes. | Un- signed8 |
S/RW | 1 a 255 | 0 |
| TARGET_MODE | 5 | Contém o modo de operação desejado para o bloco. | Un- signed8 |
S/RW | O/S, MAN, AUTO, RCAS e LO | O/S |
| MODE_BLK | 6 | Modo de operação corrente do bloco. | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados presentes dos alarmes de bloco. | DS-42 | D/ RO | 0,0,0,0 | |
| BATCH | 8 | Para uso em sistema distribuído. É utilizado para identificar canais usados e disponíveis. Não há algoritmo relacionado. | DS-67 | S/RW | 0,0,0,0 | |
| SP | 9 | Setpoint utilizado em modo automático e que ainda pode ser alterado pelo usuário. | DS-33 | N/Auto | PV_SCALE | |
| PV_SCALE | 11 | Valores de escala Eua100% e EU0% para o parâmetro SP. | DS-36 | S/RW | 0-100% | |
| READBACK | 12 | Indica o readback da posição atual do bloco transdutor. | DS-33 | D/RO | PV_SCALE | |
| RCAS_IN | 14 | Valor de setpoint remoto fornecido pelo controlador quando em modo RCas. | DS-33 | D/RW | ||
| IN_CHANNEL | 21 | O número do canal de hardware lógico do transdutor que é conectado ao bloco AO. | Un- signed16 |
S/RW | 0 | |
| OUT_CHANNEL | 22 | O número do canal de hardware lógico para o transdutor que é conectado ao bloco AO. | Un- signed16 |
S/RW | 0 | |
| FSAFE_TIME | 23 | Período da detecção da falha até a ação do bloco, se a falha segura estiver configurada. | Float | S/RW | Valores maiores que zero | 0 |
| FSAFE_TYPE | 24 | Define a ação do equipamento em uma condição de falha segura. | Un- signed8 |
S/RW | 0:Use FSAFE_VALUE 1:Use Last Usable Value 2:Goes to ACTUATOR_ACTION position |
1: Use Last Usable Value |
| FSAFE_VALUE | 25 | Valor de falha segura para a saída do bloco AO, quando o Fail Safe estiver ativo e FSAFE_TYPE = 0. | Float | S/RW | OUT_SCALE | 0 |
| RCAS_OUT | 27 | O valor e status requisitado por um bloco no controlador a fim de evitar reset windup e proporcionar transferência sem interferência em uma malha fechada de controle. | DS-33 | D/RO | ||
| POS_D | 31 | Posição discreta da válvula. | DS-34 | D/RO | 0: not initialized 1: closed 2: opened 3: intermediate |
0 |
| SETP_DEVIATION | 32 | Diferença entre SP e o Readback. | Float | D/RO | 0 | |
| CHECK_BACK | 33 | Informação do estado do equipamento. Ver opções de Check Back. | Oct- String(3) |
D/RO | 0 | |
| CHECK_BACK_MASK | 34 | Informações de CheckBack. suportadas | Oct- String(3) |
S/RO | 0 | |
| SIMULATE | 35 | Permite que o valor de readback seja fornecido manualmente pelo usuário. | DS-50 | S/RW | 0: Disable ¹0: Enable |
Disable |
| INCREASE_CLOSE | 36 | Direção da atuação quando em modo automático. | Un- signed8 |
S/RW | 0: Rising 1: Falling |
Rising |
| OUT | 37 | A saída do bloco para o bloco transdutor. | DS-33 | N/Man/RW | OUT_SCALE | |
| OUT_SCALE | 38 | Valores de escala Eu100% e Eu0% para o bloco transdutor para um canal especificado. | DS-36 | S/RW | 0-100% | |
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW - Escrita/Leitura; RO – Somente leitura; D – Dinâmico; N – Não-volátil; S – Estático; INF – Infinito |
||||||
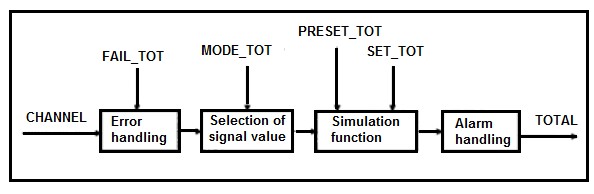
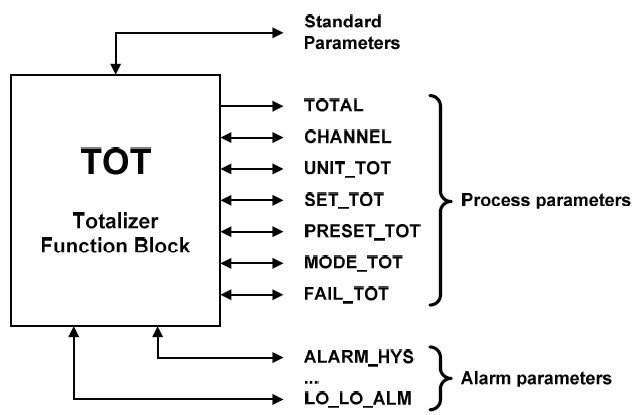
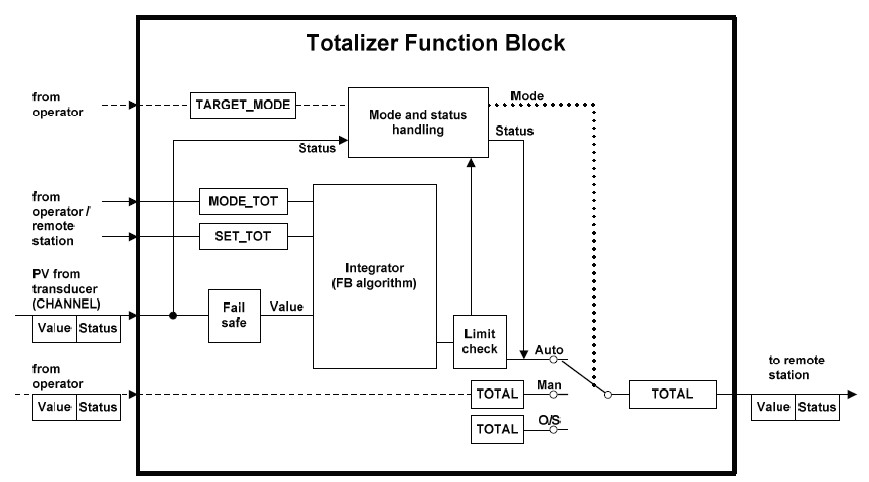
TOTALIZER BLOCK – TOT
O bloco Totalizador, assim como o bloco AI, recebe um valor de processo via canal com o bloco transdutor. Este valor é totalizado ao longo do tempo, por exemplo em medições de vazão mássica ou volumétrica, comuns em transmissores de pressão. Posteriormente, veremos as condições iniciais de configuração para que o bloco TOT tenha seu adequado funcionamento.
O bloco TOT suporta os seguintes modos de operação:
OOS (Out of Service): neste modo, o algoritmo do bloco não é processado.
| BLOCO TOTALIZADOR - TOT (Equipamentos com somente 1 TOT: slot 2, se 2 TOTs: Slot 2 e 3, se 3 TOTs: slot 2, 3 e 4) |
||||||
| Parâmetro | Índice Relativo |
Descrição | Tipo de dado |
Armazenamento em memória e acesso R/W | Faixa de valores |
Padrão (Default) |
| ST_REV | 1 | Este parâmetro será incrementado sempre que houver mudanças nos parâmetros estáticos do bloco. | Unsigned16 | S/RO | 0 | |
| TAG_DESC | 2 | TAG do bloco. Este parâmetro deve ser único na configuração. | Oct-String(32) | S/RW | Espaços | |
| STRATEGY | 3 | É um valor fornecido pelo usuário para identificar uma configuração. | Unsigned16 | S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes. | Unsigned8 | S/RW | 1 to 255 | 0 |
| TARGET_MODE | 5 | Contém o modo desejado para o bloco. | Unsigned8 | S/RW | O/S, AUTO. | AUTO |
| MODE_BLK | 6 | Modo corrente do bloco. | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados dos alarmes do bloco. | DS-42 | D/RO | 0,0,0,0 | |
| BATCH | 8 | Para uso em sistema distribuído para identificar canais usados e disponíveis. Não há algoritmo relacionado. | DS-67 | S/RW | 0,0,0,0 | |
| TOTAL | 10 | Saída do bloco TOT. | DS-33 | N/RO | ||
| UNIT_TOT | 11 | Unidade de engenharia da saída. | Unsigned16 | S/RW | ||
| CHANNEL | 12 | O número do canal lógico de hardware do bloco transdutor que é conectado ao TOT. | Unsigned16 | S/RW | 0 | |
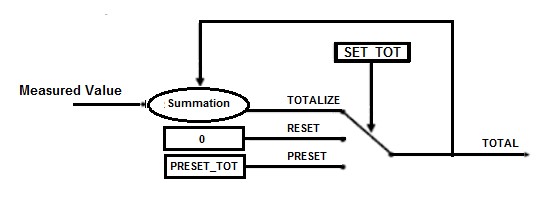
| SET_TOT | 13 | Reinicia a saída do TOT, ou a ajusta de acordo com o valor em PRESET_TOT. E ainda, permite que o bloco totalize. | UnSigned8 | N/RW | 0: Totalize 1: Reset 2: Preset |
Totalize |
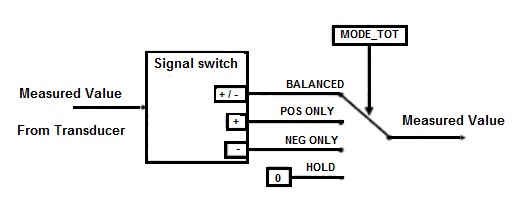
| MODE_TOT | 14 | Define o tipo de sinal dos valores para a totalização (positiva, negativa ou último valor). | UnSigned8 | N/RW | 0: Balanced 1: Positive only 2: Negative only 3: Hold |
Balanced |
| FAIL_TOT | 15 | Define a ação do bloco TOT na condição de fail safe. | UnSigned8 | S/RW | 0: Run 1: Hold 2: Memory |
Run |
| PRESET_TOT | 16 | Valor da saída quando o SET_TOT for configurado para Preset. | Float | S/RW | 0 | |
| ALARM_HYS | 17 | Parâmetro de histerese de alarme. Para sair da condição de alarme, o valor da PV deve ser inferior ao limite do alarme somado à histerese. | Float | S/RW | 0 | |
| HI_HI_LIM | 18 | Ajuste de alarme muito alto em unidades de Engenharia. | Float | S/RW | INF | |
| HI_LIM | 19 | Ajuste de alarme alto em unidades de Engenharia. | Float | S/RW | INF | |
| LO_LIM | 20 | Ajuste de alarme baixo em unidades de Engenharia. | Float | S/RW | INF | |
| LO_LO_LIM | 21 | Ajuste de alarme muito baixo em unidades de Engenharia. | Float | S/RW | INF | |
| HI_HI_ALM | 22 | Estado de alarme muito alto. | DS-39 | D/RW | ||
| HI_ALM | 23 | Estado de alarme alto. | DS-39 | D/RW | ||
| LO_ALM | 24 | Estado de alarme baixo | DS-39 | D/RW | ||
| LO_LO_ALM | 25 | Estado de alarme muito baixo. | DS-39 | D/RW | ||
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW – Escrita/Leitura; RO – Somente leitura; D – Dinâmico; N – Não-volátil; S –Estático; INF – Infinito |
||||||
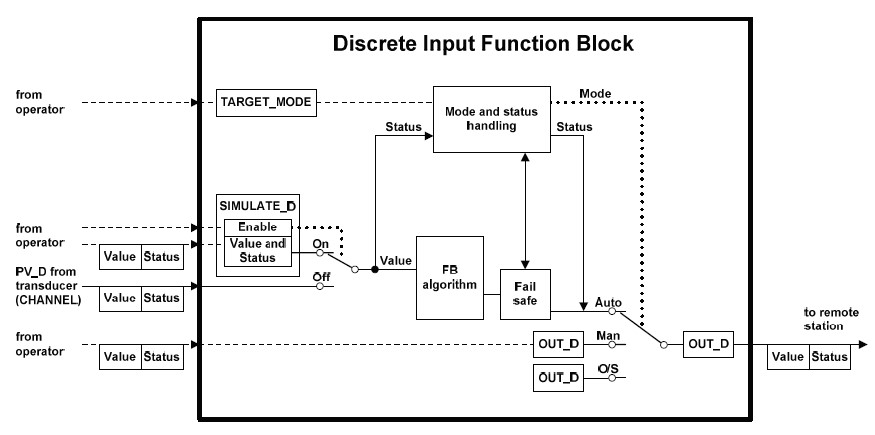
| BLOCO DIGITAL DE ENTRADA - DI (Equipamentos com somente 1 DI slot 1, se 2 DIs: Slot 1 e 2, se 3 DIs: slot 1, 2 e 3) |
||||||
| Parâmetro | Índice Relativo | Descrição | Tipo de dado | Armazenamento em memória e acesso R/W | Faixa de valores |
Padrão (Default) |
| ST_REV | 1 | Este parâmetro será incrementado sempre que houver mudanças nos parâmetros estáticos do bloco. | Unsigned16 | S/RO | 0 | |
| TAG_DESC | 2 | TAG do bloco. Este parâmetro deve ser único na configuração. | Oct-String(32) | S/RW | Espaços | |
| STRATEGY | 3 | Valor fornecido pelo usuário para identificar uma configuração. | Unsigned16 | S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes. | Unsigned8 | S/RW | 1 to 255 | 0 |
| TARGET_MODE | 5 | Contém o modo desejado para o bloco. | Unsigned8 | S/RW | O/S, AUTO. | AUTO |
| MODE_BLK | 6 | Modo corrente do bloco. | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados dos alarmes do bloco. | DS-42 | D/RO | 0,0,0,0 | |
| BATCH | 8 | Para uso em sistema distribuído para identificar canais usados e disponíveis. Não há algoritmo relacionado. | DS-67 | S/RW | 0,0,0,0 | |
| OUT_D | 10 | Saída discreta do bloco DI. | DS-34 | S/RW | 0-1 | |
| CHANNEL | 14 | Canal de hardware associado ao bloco TRD. | Unsigned16 | S/RW | ||
| INVERT | 15 | Indica se a PV_D deve ser invertida logicamente, antes de ser atribuída à saída OUT_D | Unsigned 8 | S/RW | 0: not inverted 1: inverted |
0 |
| FSAVE_TYPE | 20 | Permite configurar o tipo de fail safe. | Unsigned 8 | S/RW | 0: o valor em FSAFE_VAL_D é usado em OUT_D Status = UNCERTAIN-substitute value (**) 1: usar o último valor válido armazenado em OUT_D Status = UNCERTAIN-last usable value (se não houver nenhum valor válido, usará UNCERTAIN-Initial Value ) 2: OUT_D usará o valor e status que vem do bloco TRD, mesmo que seja inadequado(Bad) Status |
1 |
| FSAVE_VAL_D | 21 | Valor discreto utilizado como valor de segurança quando o FAIL_SAFE_TYPE for 0. | Unsigned 8 | S/RW | 0 | |
| SIMULATE | 24 | Pemite que seja simulado um valor discreto de entrada | DS-51 | S/RW | 0: disable #0: enable |
disable |
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW - Escrita/Leitura; RO – Somente leitura; D – dinâmico; N – não-volátil; S – Estático; INF – Infinito |
||||||
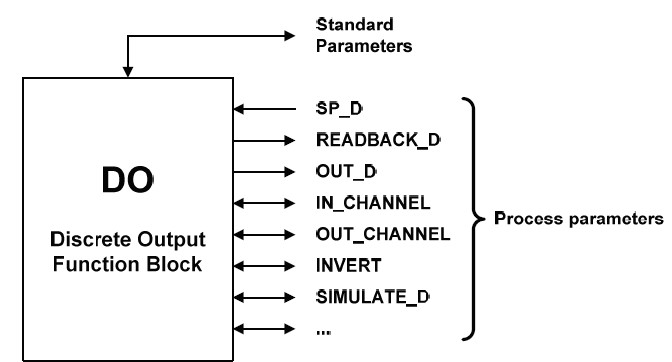
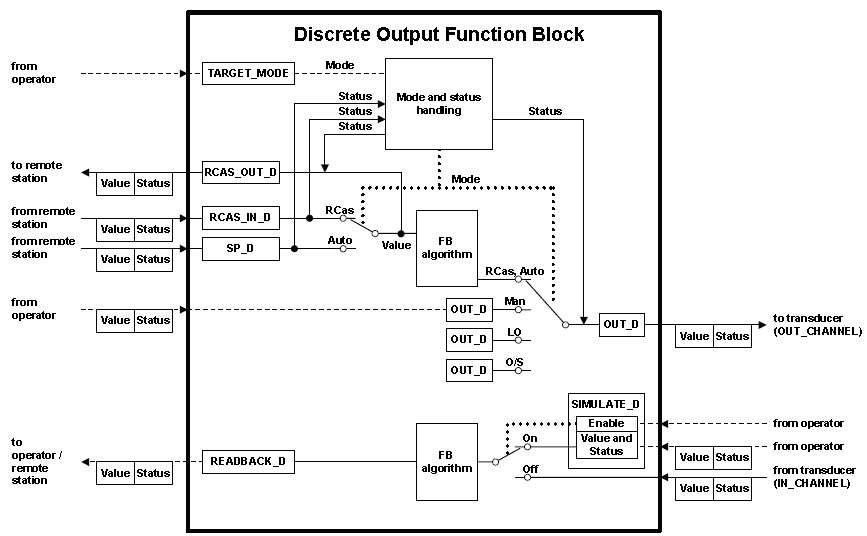
| BLOCO DE SAÍDA DIGITAL - DO (Equipamentos com somente 1 DO slot 1, se 2 DOs: Slot 1 e 2, se 3 DOs: slot 1, 2 e 3) |
||||||
| Parâmetro | Índice Relativo |
Descrição | Tipo de dado | Armazenamento em memória e acesso R/W | Faixa de valores |
Padrão (Default) |
| ST_REV | 1 | Este parâmetro será incrementado sempre que houver mudanças nos parâmetros estáticos do bloco. | Unsigned16 | S/RO | 0 | |
| TAG_DESC | 2 | TAG do bloco. Este parâmetro deve ser único na configuração. | Oct-String(32) | S/RW | Espaços | |
| STRATEGY | 3 | É um valor fornecido pelo usuário para identificar uma configuração. | Unsigned16 | S/RW | 0 | |
| ALERT_KEY | 4 | Estado atual de alarmes | Unsigned8 | S/RW | 1 to 255 | 0 |
| TARGET_MODE | 5 | Contém o modo desejado para o bloco. | Unsigned8 | S/RW | O/S, AUTO. | AUTO |
| MODE_BLK | 6 | Modo corrente do bloco | DS-37 | D/RO | ||
| ALARM_SUM | 7 | Contém os estados dos alarmes do bloco. | DS-42 | D/RO | 0,0,0,0 | |
| BATCH | 8 | Para uso em sistema distribuído para identificar canais usados e disponíveis. Não há algoritmo relacionado. | DS-67 | S/RW | 0,0,0,0 | |
| SP_D | 9 | Setpoint do bloco de função usado em MODE AUTO. | DS-34 | D/RW | 0 e 1 | - |
| OUT_D | 10 | Saída discreta do bloco DO | DS-34 | D/RW | 0 e 1 | - |
| READBACK_D | 12 | Pode ser a posição atual(discreta) do elemnto final de controle e seus sensores. | DS-34 | D/RO | 0 e 1 | - |
| RCAS_IN_D | 14 | Setpoint e status desejado fornecido pelo controlado mestre Profibus ao bloco DO quando o modo de operação for RCas. | DS-34 | D/RW | 0 e 1 | - |
| CHANNEL | 17 | Canal de hardware do bloco TRD associado ao bloco DO | Unsigned16 | S/RW | - | |
| INVERT | 18 | Utilizado para inverte o setpoint fornecido ao bloco DO: 0 = não inverter 1 = inverter |
Unsigned 8 | S/RW | 0 e 1 | Não inverter |
| FSAFE_TIME | 19 | Período da detecção da falha (SP_D =Bad ou RCAS_IN <> Good) até que haja ação do bloco, se a condição de falha segura existir. | Float | S/RW | maior que zero |
0 |
| FSAFE_TYPE | 20 | Define a ação do equipamento se houver uma falha e após FSAFE_TIME: 0 = valor FSAVE_VALUE é usado como status do setpoint do OUT_D = UNCERTAIN – Valor substituto; 1 = armazenar o status do último setpoint válido do OUT_D = UNCERTAIN – Último valor usável ou BAD – sem comunicação, no último valor válido; 2 = atuador vai para posição de fail-safe definida pelo ACTUATOR_ACTION, status de OUT_D = BAD – não especificado |
Unsigned 8 | S | 0,1 e 2 | 2 |
| FSAFE_VAL_D | 21 | Valor discreto utilizado na condição de falha segura, caso o FSAFE_TYPE seja configurado para FSAFE_VAL_D. | Unsigned 8 | S/RW | 0 e 1 | 0 |
| RCAS_OUT_D | 22 | Valor discreto e status que retorna do bloco DO ao controlador. | DS-34 | D/RO | 0 e 1 | - |
| SIMULATE | 24 | Para comissionamento e razões de manutenção, é possível simular o valor do READBACK, definindo-se o valor e status. Nesta condição de simulação, o valor do bloco DO é desprezado. | DS-51 | S/RW | 0 e 1, enable;disable | Disable |
| Legenda: E – Parâmetro Enumerado; NA – Parâmetro Adimensional; RW - Escrita/Leitura; RO – Somente leitura; D – Dinâmico; N – Não-volátil; S – Estático; INF – Infinito | ||||||
| Modo | Valor (HEX) |
| Out of Service: O/S | 0x80 |
| Local Override: LO | 0x20 |
| Manual: Man | 0x10 |
| Automático: Auto | 0x08 |
| Cascata: Rcas | 0x02 |
| Byte de Status | |||||||
| Bit 27 | Bit 26 | Bit 25 | Bit 24 | Bit 23 | Bit 22 | Bit 21 | Bit 20 |
| Qualidade | Sub-qualidade | Limites | |||||
| Bad | 27,6 = 00, bad value | O valor não é útil. |
| Uncertain | 27,6 = 01, uncertain value | A qualidade do valor está abaixo do normal, mas o valor ainda o valor pode ser usado. |
| Good | 27,6 = 10, good value | O valor é bom |
| Bad | Device Failure: 25 a 22 = 0010 Sensor Failure: 25 a22 = 0100 No Communication: 25 a22 = 0101 |
| Uncertain | Last Usable Value: 25 a 22 = 0001 – é utilizado quando o valor não está mais sendo atualizado. Sensor Conversion not Accurate: 25 a 22 = 0100 – é utilizado quando o valor do sensor está fora de seus limites. |
| Good | Ok: 25 a 22 = 0000 – o valor está bom. Active Advisory Alarm: 25 a 22 = 0010 – é utilizado quando o valor excede ou cai abaixo do valor de aviso de alarme. |
| Not limited | 21,0 =00- not limited – o valor medido está dentro de seus limites aceitáveis. |
| Low limited | 21,0 =01- Lower limit – o valor medido está abaixo do limite inferior aceitável. |
| High limited | 21,0 =10- Upper limit – o valor medido está acima do limite inferior aceitável. |
| Constant | 21,0 =11- Constant – o valor medido não está sendo variado com o processo, por exemplo, está em manual. |
|
Qualidade
|
Sub-Status | Limite | Valor Hexa | Valor Decimal |
|---|---|---|---|---|
| GoodNC | 0 = ok | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x80 | 128 |
| GoodNC | 1 = Active Update Event | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x84 | 132 |
| GoodNC | 2 = Active Advisory Alarm | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x88 | 136 |
| GoodNC | 3 = Active Critical Alarm | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x8C | 140 |
| GoodNC | 4 = Unacknowledged Update Event | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x90 | 144 |
| GoodNC | 5 = Unacknowledged Advisory Alarm | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x94 | 148 |
| GoodNC | 6 = Unacknowledged Critical Alarm | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x98 | 152 |
| GoodNC | 8 = Initiate Fail Safe (IFS) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xA0 | 160 |
| GoodNC | 9 = Maintenance required | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xA4 | 164 |
| Uncertain | 0 = Non-specific | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x40 | 64 |
| Uncertain | 1 = Last Usable Value | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x44 | 68 |
| Uncertain | 2 = Substitute | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x48 | 72 |
| Uncertain | 3 = Initial Value | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x4C | 76 |
| Uncertain | 4 = Sensor Conversion not Accurate | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x50 | 80 |
| Uncertain | 5 = Engineering Unit Range Violation | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x54 | 84 |
| Uncertain | 6 = Sub-normal | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x58 | 88 |
| Uncertain | 7 = Configuration Error | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x5C | 92 |
| Uncertain | 8 = Simulated Value | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x60 | 96 |
| Uncertain | 9 = Sensor Calibration | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x64 | 100 |
| GoodC | 0 = ok | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xC0 | 192 |
| GoodC | 1 = Initialization Acknowledged (IA) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xC4 | 196 |
| GoodC | 2 = Initialization Request (IR) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xC8 | 200 |
| GoodC | 3 = Not Invited (NI) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xCC | 204 |
| GoodC | 5 = Do Not Selected (NS) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xD4 | 212 |
| GoodC | 6 = Local Override (LO) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xD8 | 216 |
| GoodC | 8 = Initiate Fail Safe (IFS) | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0xE0 | 224 |
| Bad | 0 = Non-specific | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x00 | 0 |
| Bad | 1 = Configuration Error | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x04 | 4 |
| Bad | 2 = Not Connected | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x08 | 8 |
| Bad | 3 = Device Failure | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x0C | 12 |
| Bad | 4 = Sensor Failure | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x10 | 16 |
| Bad | 5 = No Communication, with last usable value | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x14 | 20 |
| Bad | 6 = No Communication, with no usable value | 0 – Not Limited; 1 – Low Limited; 2 – High Limited; 3 - Constant | 0x18 | 24 |
| Bad | 7 = Out of Service | 0 – Not Limited;1 – Low Limited; 2 – High Limited; 3 - Constant | 0x1C | 28 |
| Código | Tipo de Dado | Tamanho | Descrição |
|---|---|---|---|
| 1 | Boolean | 1 | Verdadeiro ou falso |
| 2 | Integer8 | 1 | Inteiro de 8 bits |
| 3 | Integer16 | 2 | Inteiro de 16 bits |
| 4 | Integer32 | 4 | Inteiro de 32 bits |
| 5 | Unsigned8 | 1 | Inteiro sem sinal de 8 bits |
| 6 | Unsigned 16 | 2 | Inteiro sem sinal de 16 bits |
| 7 | Unsigned 32 | 4 | Inteiro sem sinal de 32 bits |
| 8 | Floating Point | 4 | Ponto flutuante IEEE 754 |
| 9 | VisibleString | 1,2,3,... | Um byte por caractere e inclui os caracteres ASCII de 7 bits. |
| 10 | OctetString | 1,2,3,… | Octetstrings são bináros |
| - | Dados | - | |
| - | TimeofDay | - | |
| - | TimeDifference | - | |
| - | BitString | - | |
| - | DataTimeValue | - |
Esta estrutura de dados consiste nos atributos de um bloco.
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Reserved | Unsigned8 | 1 |
| 2 | Block Object | Unsigned8 | 1 |
| 3 | Parent Class | Unsigned8 | 1 |
| 4 | Class | Unsigned8 | 1 |
| 5 | DD REFERENCE | Unsigned32 | 4 |
| 6 | DD REVISION | Unsigned16 | 2 |
| 7 | Profile | OctetString | 2 |
| 8 | Profile Revision | Unsigned16 | 2 |
| 9 | Execution Time | Unsigned8 | 1 |
| 10 | Number_of_Parameters | Unsigned16 | 2 |
| 11 | ADDRESS OF VIEW_1 | Unsigned16 | 2 |
| 12 | Number of Views | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Value | Float | 4 |
| 2 | Status | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Value | Unsigned8 | 1 |
| 2 | Status | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | EU at 100% | Float | 4 |
| 2 | EU at 0% | Float | 4 |
| 3 | Units Index | Unsigned16 | 2 |
| 4 | Decimal Point | Integer8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Actual | Bitstring | 1 |
| 2 | Permitted | Bitstring | 1 |
| 3 | Normal | Bitstring | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Unacknowledged | Unsigned8 | 1 |
| 2 | Alarm State | Unsigned8 | 1 |
| 3 | Time Stamp | Time Value | 8 |
| 4 | Subcode | Unsigned16 | 2 |
| 5 | Value | Float | 4 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Unacknowledged | Unsigned8 | 1 |
| 2 | Alarm State | Unsigned8 | 1 |
| 3 | Time Stamp | Time Value | 8 |
| 4 | Subcode | Unsigned16 | 2 |
| 5 | Value | Float | 4 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Unacknowledged | Unsigned8 | 1 |
| 2 | Alarm State | Unsigned8 | 1 |
| 3 | Time Stamp | Time Value | 8 |
| 4 | Subcode | Unsigned16 | 2 |
| 5 | Value | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Unacknowledged | Unsigned8 | 1 |
| 2 | Update State | Unsigned8 | 1 |
| 3 | Time Stamp | Time Value | 8 |
| 4 | Subcode | Unsigned16 | 2 |
| 5 | Relative Index | Unsigned16 | 2 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Current | Bit String | 2 |
| 2 | Unacknowledged | Bit String | 2 |
| 3 | Unreported | Bit String | 2 |
| 4 | Disabled | Bit String | 2 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Simulate Status | Unsigned8 | 1 |
| 2 | Simulate Value | Float | 4 |
| 3 | Simule En/Disable | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | Simulate Status | Unsigned8 | 1 |
| 2 | Simulate Value | Unsigned8 | 1 |
| 5 | Simule En/Disable | Unsigned8 | 1 |
| E | Nome do elemento na estrutura | Tipo de Dado | Tamanho |
| 1 | BATCH_ID | Unsigned32 | 4 |
| 2 | RUP | Unsigned16 | 2 |
| 3 | OPERATION | Unsigned16 | 2 |
| 4 | PHASE | Unsigned16 | 2 |